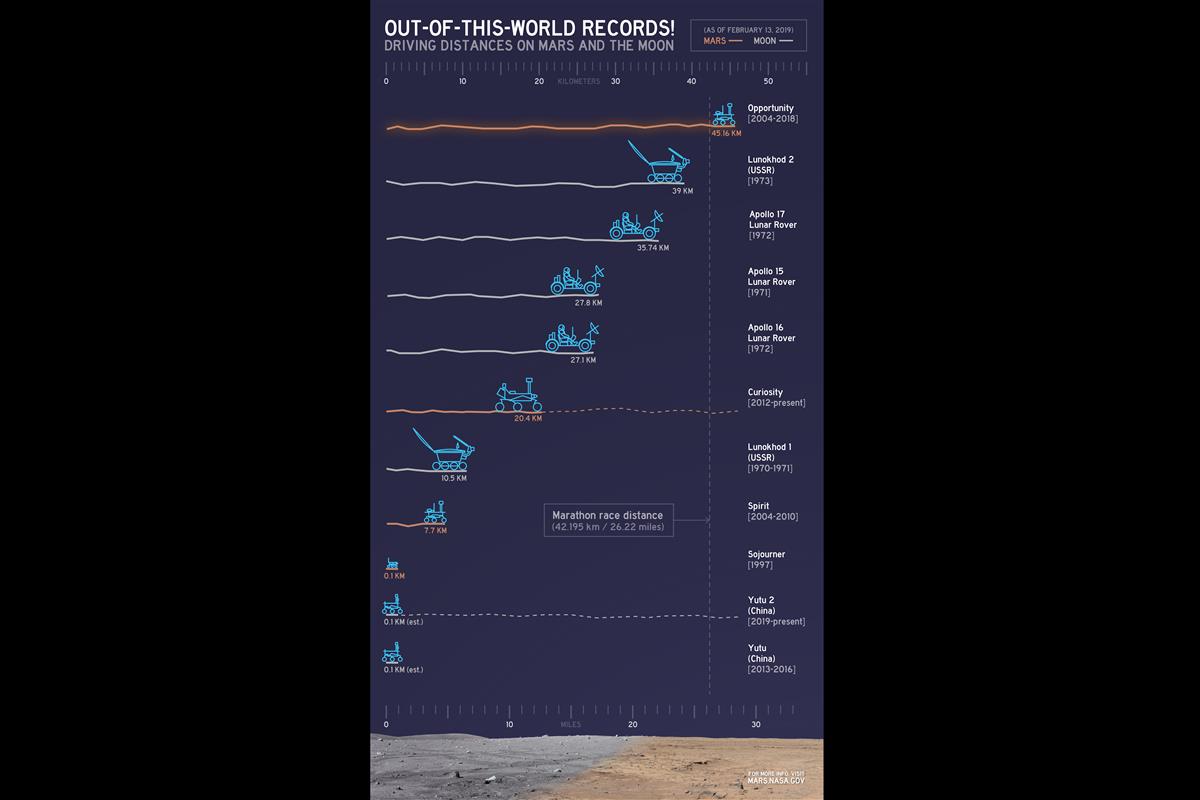
月面着陸機が着陸すると、その外面に搭載された全長3m、質量200kgのローバーを船外活動によって降ろします。定員2名のLRVは電動駆動であり、最高時速17.1kmを記録しています。アポロ15号の「LRV-001」は27.8km、16号の「LRV-002」は27.1km、17号の「LRV-003」は35.74kmを走行し、歴代ローバーの総走行距離では3位から5位を占めています。いまだかつて人類は月にしか降り立っていないため、このLRVは史上唯一の有人探査ローバー・モデルと言えます。
【宇宙探査ローバーの総走行距離ランキング】(2019年2月公表)
1971年にソ連が打ち上げた幻の小型ローバー
ソビエトは1970年代初頭、月、金星、火星への無人探査機計画を次々と推し進めますが、火星を対象とした「マルス計画」においては1971年5月、「マルス2号」と「マルス3号」を打ち上げます。
この2機の同型探査機には、全長わずか21.5cm、質量4.5kgの探査機「プロップM」が搭載されていました。
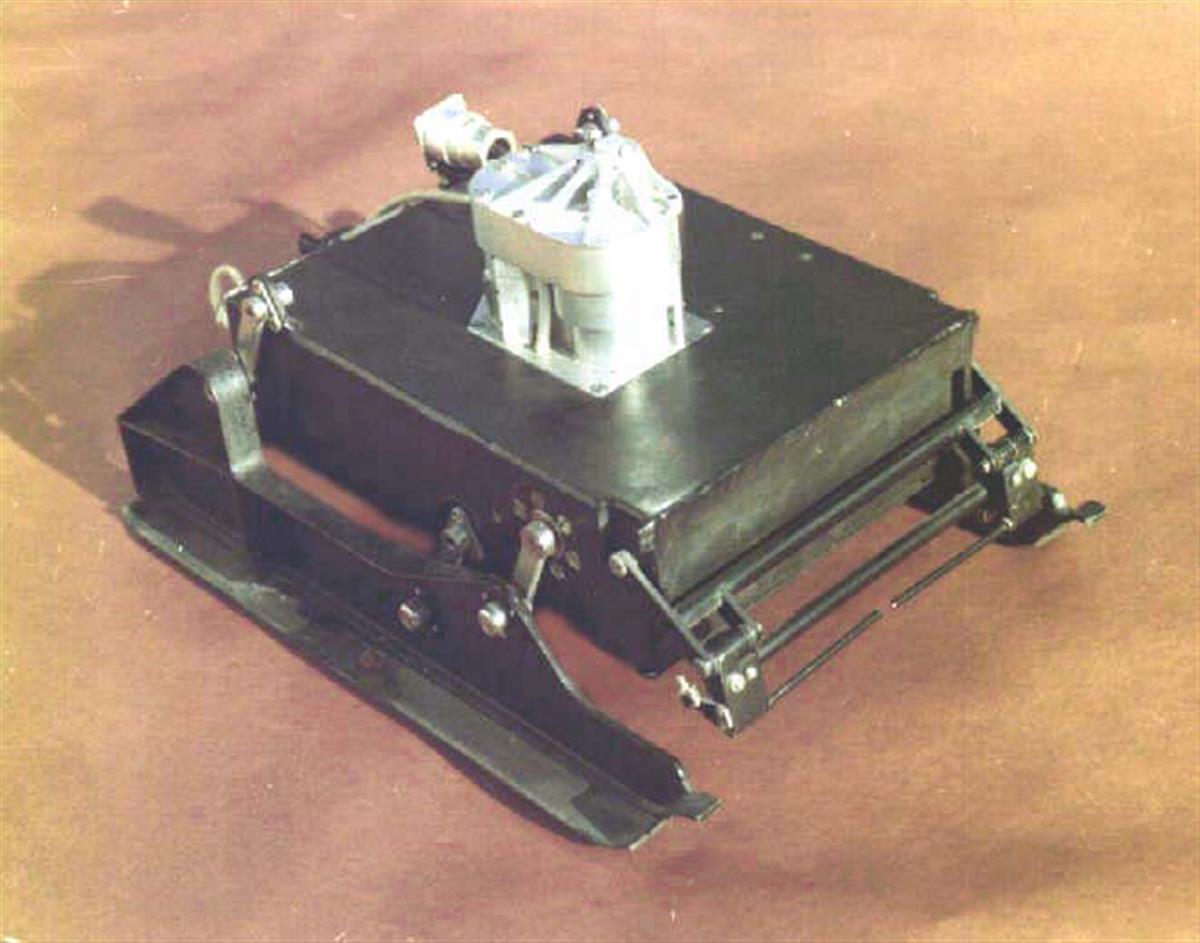
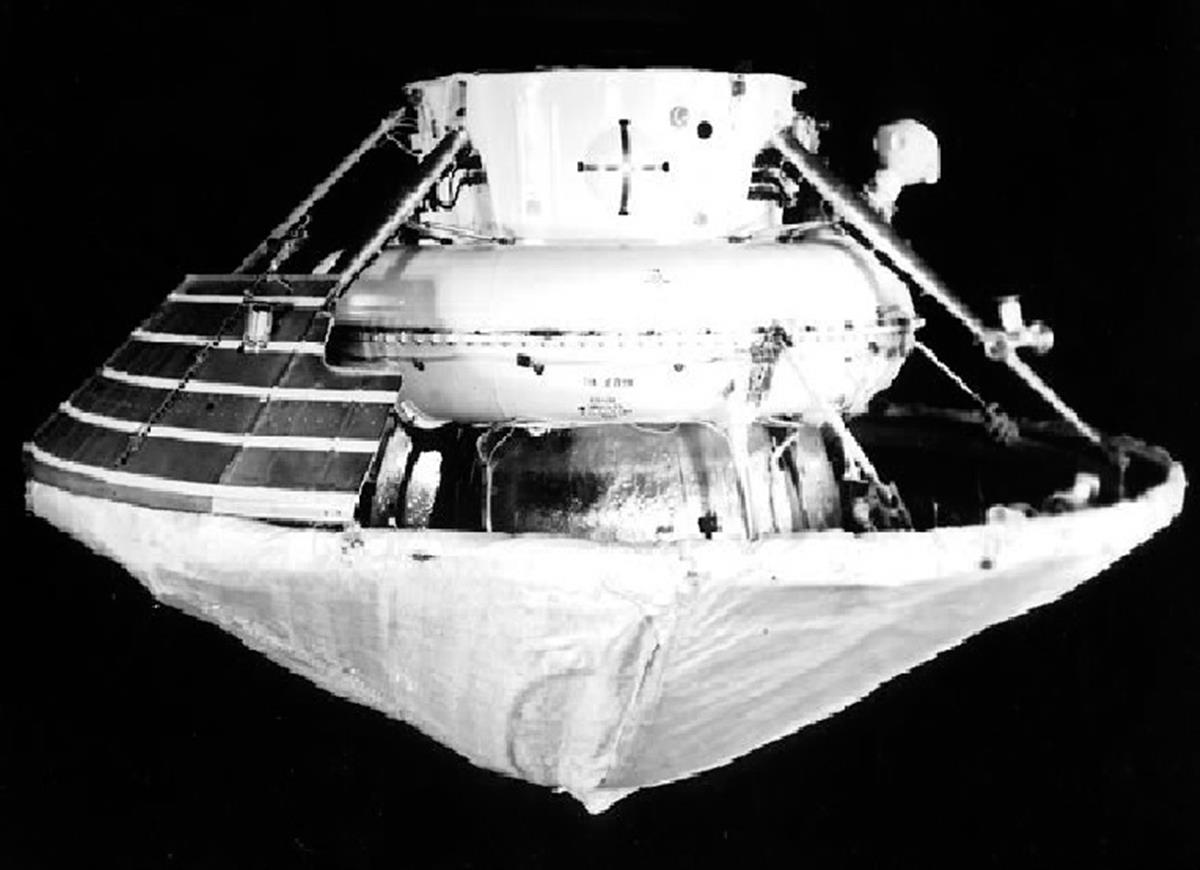
スキッドによって移動するこの小型ローバーは、着陸機が火星地表に到達するとそこから出動します。着陸機本体とは15mのケーブルでつながれ、その範囲内での移動が可能でした。もしこれが成功していれば史上初の火星探査ローバーになるはずでしたが、マルス2号は着陸に失敗して火星地表に激突。マルス3号は着陸後わずか15秒で通信が途絶し、運用には至りませんでした。
NASAの火星探査ローバー
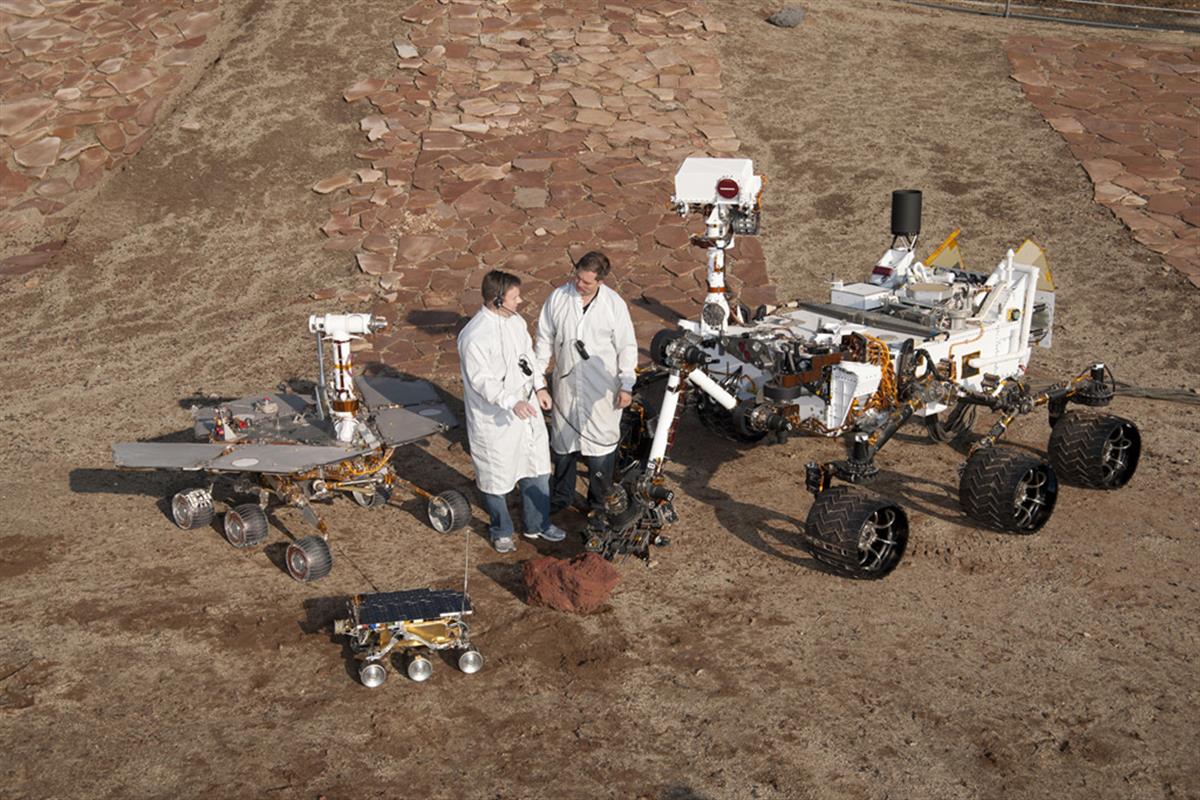
1990年代に入るとNASAの火星探査計画が加速します。1996年には「パスファインダー」、2003年には「スピリット」と「オポテュニティ」、2011年には「キュリオシティ」、今年7月には「パーセヴェランス」が打ち上げられました。パスファインダーには史上初の火星探査ローバー「ソジャーナ」が搭載されていましたが、その質量は10.6kg。その四半世紀後に打ち上げられた最新のパーセヴェランスは1025kgであり、その質量は97倍にもなっています。
スピリットとオポテュニティまではソーラーパネルによるバッテリー駆動だったため、パネルに砂が被ると充電できなくなりましたが、キュリオシティとパーセヴェランスは原子力電池を搭載しており、その心配がありません。
2012年8月に火星に着陸したキュリオシティは現在も運用中であり、その現在地や総走行距離はNASAのウェブサイト(外部サイト)で確認できます。
中国のローバーが史上はじめて月の裏側へ
2003年に有人宇宙船、2011年に宇宙ステーションの打ち上げに成功した中国は、2018年12月、史上はじめて月の裏側に月面探査ローバー「玉兎2号」を着陸させました。月の裏側には電波が届きません。そのため月の裏側のラグランジュ点という軌道に世界ではじめて通信衛星を乗せ、それによって月面の玉兎2号と通信するという、非常に難易度の高いプロジェクトを成功させたのです。この玉兎2号は2019年7月、月面にゲル状の物質を発見し、世界中の科学者の注目を集めました。
この技術を発展させるべく、中国は今年7月に火星へむけて「天問1号」を打ち上げており、そこには質量240kgのローバーが搭載されていて、来年2月に火星へ到達する予定です。
【宇宙探査ローバー 総走行距離の比較】


【宇宙開発のボラティリティ】は宇宙プロジェクトのニュース、次期スケジュール、歴史のほか、宇宙の基礎知識を解説するコラムです。50年代にはじまる米ソ宇宙開発競争から近年の成果まで、激動の宇宙プロジェクトのポイントをご紹介します。